設為首頁 | 收藏本站


|
|
西松建設聯合日本高校研發水路隧道檢查機器人 二維碼
2
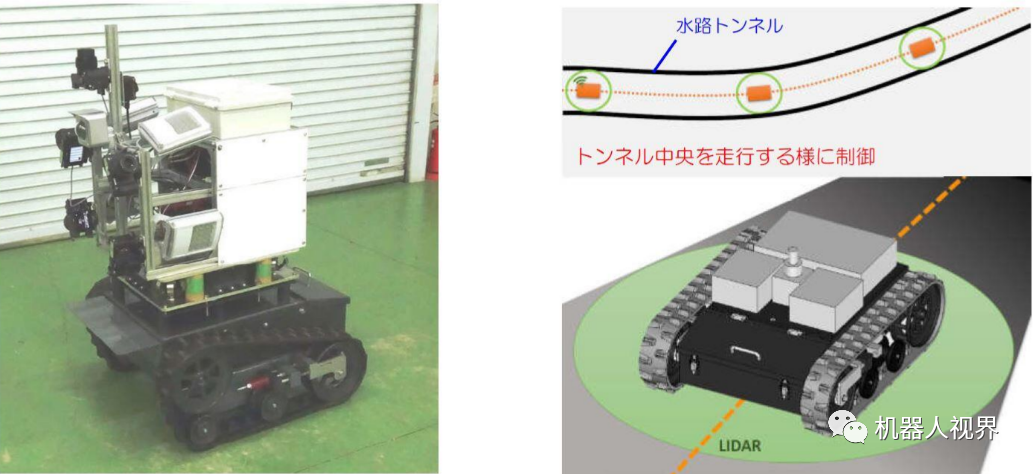
西松建設與佐賀大學理工學部的伊藤辛廣研究室合作研發一款自動化檢查水路隧道的機器人turtle,機器人在隧道內邊自主行走邊通過檢測相機拍攝墻壁的高清圖像,通過對圖像進行分析進而自動檢出墻壁的裂紋,相比工作人員直接進入隧道的目視檢查方式,運營管理效率大幅提升,相比已有的其他類型檢查機器人,turtle運行穩定可靠性更高。
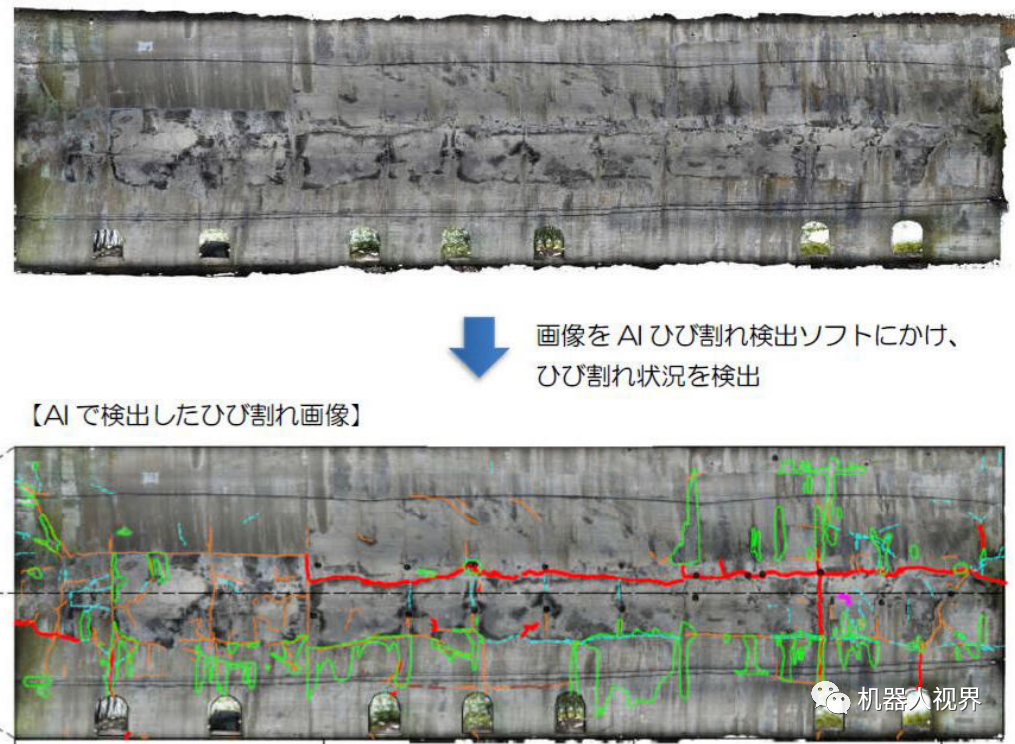
機器人由行走機構和檢測機構組成,采用電池驅動,可在直徑約6m,總長約2km的隧道內進行檢測作業。機器人行走機構安裝有采用SLAM技術的控制系統,通過LiDAR等檢測物體形狀,準確把握自身與墻面的位置關系,以及障礙物的信息,沿著隧道線保持中間位置自主行走。當遇到難以繞開的障礙物時就會自動停機。 機器人檢測機構搭載LED照明及用于檢測的5臺相機,可獲取周圍墻面的高清晰圖像,利用這些圖像構建3D模型,基于3D模型生成展開圖,最后利用AI技術自動檢出寬度在0.1mm以上的裂紋,機器人檢測方式不僅降低了檢查人員的負擔,還保證了檢測結果的客觀性。
在檢測機構的前后除了安裝有檢測用相機之外,也搭載了廣角相機,這款相機可以對隧道內的情況拍照,確認水路隧道內的漏水及異常點,從而為后續的維修改造提供參考。 日本規定水電站等需要對水路隧道每3年進行一次檢查,傳統目視檢查不僅面臨安全風險,處理草圖記錄的信息也需要時間和精力。目前已有的無人機型、漂浮型、飛艇型檢測機器人,都存在因載重有限,電池容量受限導致續航短、受水流和風力影響難以控制機體方向等問題。 展會新聞
|